<abbr id="g9qqk"></abbr>
人形機器人進化歷程
這些兩足機器人具有更好的傳感器、類似肌肉的致動器和更為先進的規劃控制系統,機器人已經越來越像真人。
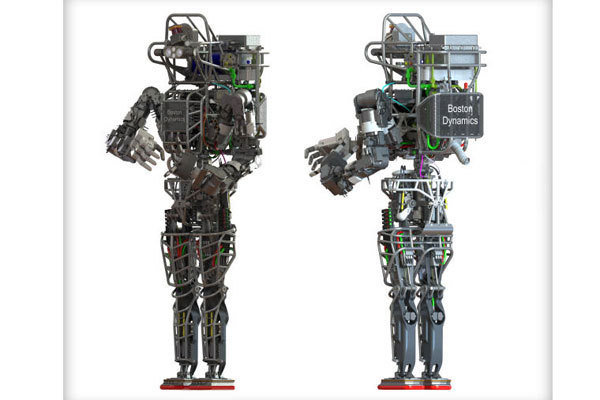
1.DARPA近期揭曉了一款最嚇人的未來派機器人Atlas。這款巨大的人形機器人
2.橡膠人造肌肉,1967
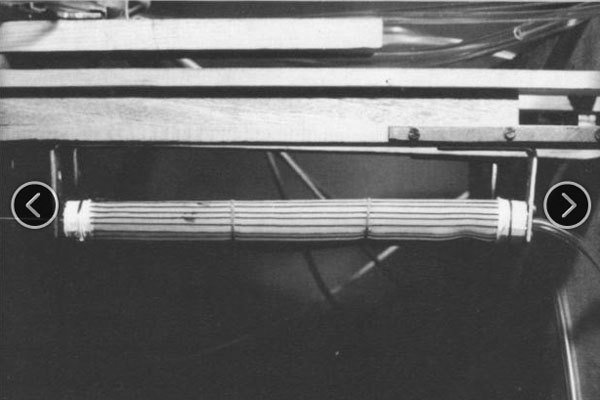
1967年,早期機器人研究中心日本早稻田大學的Ichiro Kato教授及其團隊研發出人造肌肉。沿軸內嵌幾股線中的橡膠首次產生了類似肌肉的運動,橡膠由于線的橫向壓縮發生了縱向收縮。
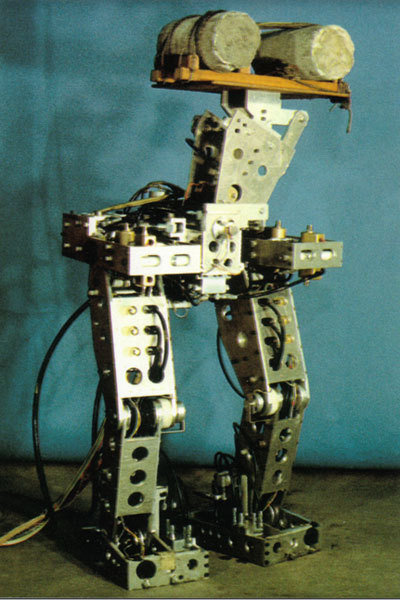
3.主從式人形步行機,1968

早稻田大學的WL-3是下肢運動的力學模型,內部有電動液壓的伺服電機,通過主從式方式受控。
WL-3首次可以像人一樣搖擺站立,下肢可以起立坐下。
4.橡膠制成的人造肌肉,1969

擬人化的氣動激活裝置WAP-1 具有由橡膠制成的人造肌肉,并且與一個致動器相連。通過控制人造肌肉,兩腳便可以運動起來。
5.靜態行走, WL-5,1970
早稲田大學的WL-5機器人受控于一臺小型計算機,可以行走并改變方向,但是該機器人移動速度很慢,每步要用45秒鐘。
6.Wabot-1, 1973
Wabot-1是世界上第一個真人大小的人形機器人,融合肢體運動控制系統,視覺系統和溝通平臺于一身。Wabot-1內部的傳感器使其可以測量到物體的距離和方向,機器人可以行走甚至使用帶有觸覺傳感器的手臂抓住并移動物體。
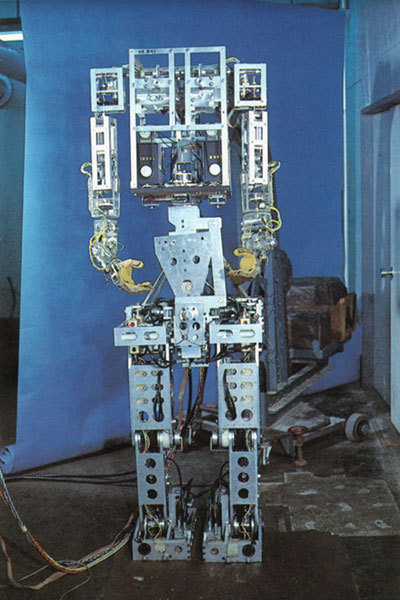
7.實現動態行走,1984
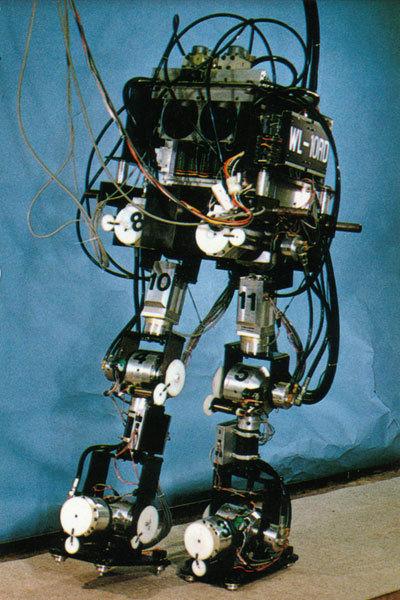
早稻田大學的WL-10RD具有踝關節和髖關節,這樣機器人兩腿之間可以很好地掌握平衡。
這項科技進步使得機器人行走成為現實。
8.Shadow,1987
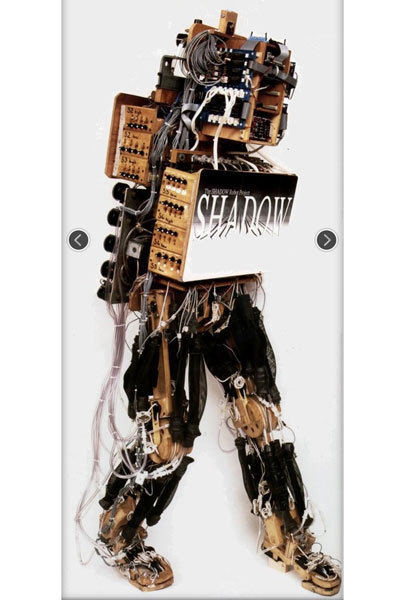
Shadow機器人公司由理查德•格林希爾(Richard Greenhill)在1987年建立,一直致力于制造機器人,開發相關技術,旨在制造可以完成家中日常任務的多功能機器人。
9.Manny, 1989
西北太平洋國家實驗室(Pacific Northwest National Laboratory)機器人Manny于1989年為美國軍隊建造。當時的Manny與真人一樣大小,與人非常相似,但是并不智能,也不能自動移動。
10. P2,1996

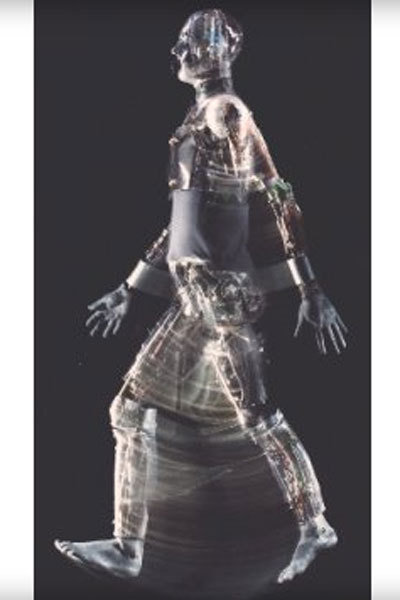
11.H5,1998

1998年,東京大學的JSK實驗室制造了真人一樣大小的H5機器人。
12.REEM-A, 2005
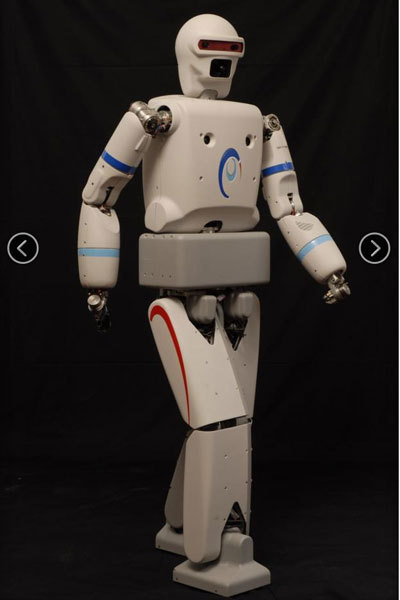
REEM-A是一款可以行走、具有語言和視覺功能的機器人平臺,完成于2005年。2006年,該機器人參加了不來梅港市的RoboCup比賽,贏得了競步比賽,并通過點球成功晉級半決賽。
2007年,運行與06年同樣軟件的REEM-A參加了在亞特蘭大舉行的RoboCup,并晉級點球比賽的決賽。
13.Robothespian, 2005

Robespierre始于2005年的英國,由Engineered Arts Limited公司推出,Robespierre機器人使用簡單、理解多種語言、能夠和人交流互動,目前售價為85,000美元。
14.HRP-3 Promet, 2007

160厘米高、68千克的人形機器人HRP-3 Promet是HRP-2 Promet人形機器人的升級模式,由川田工業、日本高級工業科學技術研究所和川崎重工業聯合打造。
15.Dexter, 2007

圖中跳躍的Dexter有
Anybots在機器人體內生成可以區分向上還是向下的系統。調節機器人腿部的“肌肉”,或者說氣缸。
16.Aero-Blue, 2008
17.本田的Asimo

本田的人形機器人Asimo于
18.物理智能

這些機器人有更優的控制系統、傳感器和栩栩如生的致動器,已經可以向更先進的領域進發,使用為人所用的工具。
接下來呢?當然是大腦——DARPA已經開始致力于這方面了。
今年早些時候,加州大學洛杉磯分校的化學教授James K. Gimzewski在《國防雜志》中表示,通過模仿大腦的自組織特征,我們可以翹首以盼機器人系統的革命性突破。
Gimsewski供職于DARPA的物理智能計劃。他說,“我們并不是像傳統計算機那樣把信息從存儲器傳至處理器,而是以全新的方式處理信息。
機器人的發展歷程已超過30年,相信人機并行的時代已經離我們并不遙遠。一起看看機器人的進化歷程吧。